Description
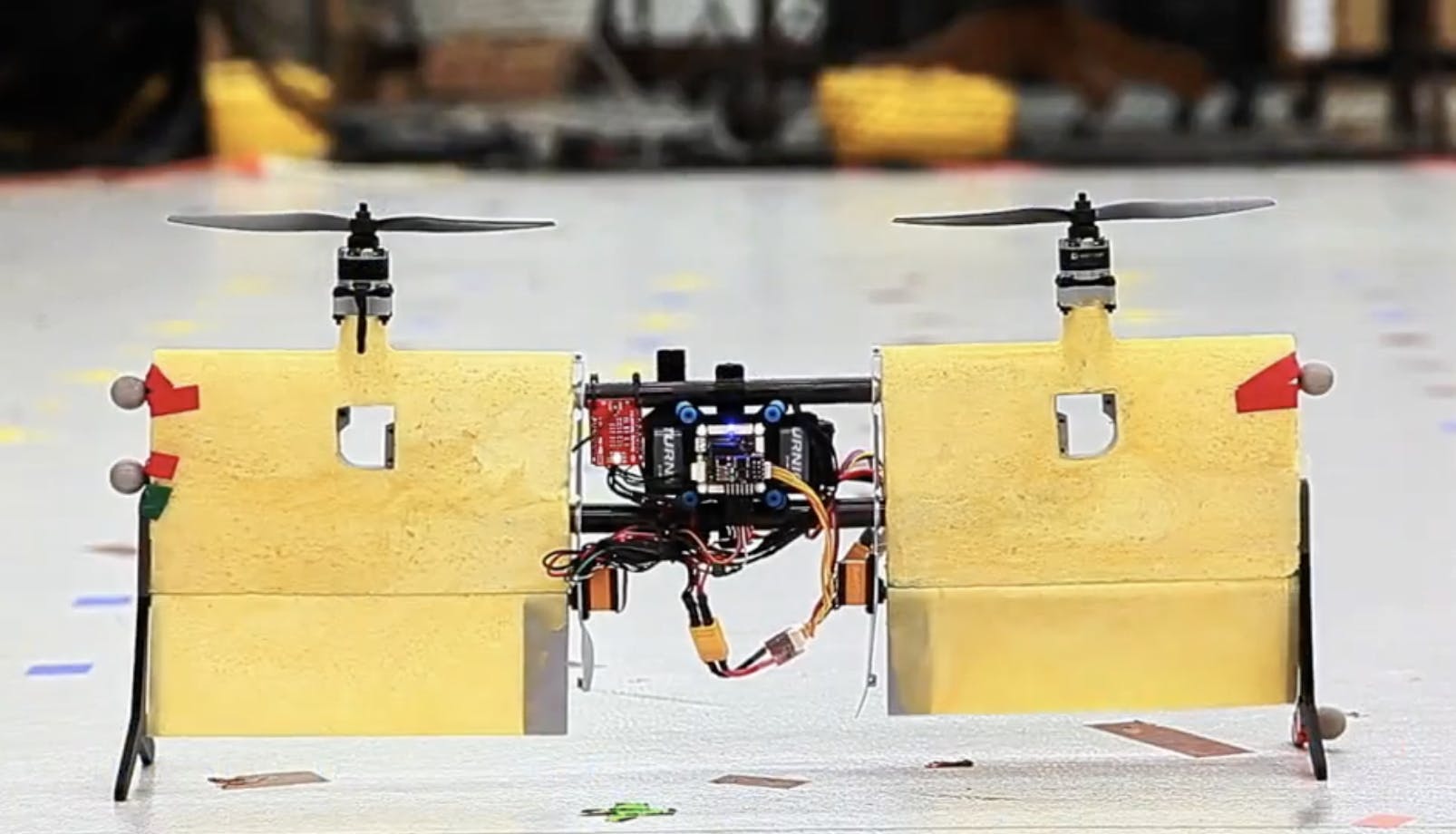
Engineers at the University of Toronto have designed a fully open sourced dual-rotor tail-sitter MAV using readily available electronics and 3D-printed parts. The Phoenix drone is based on the PX4 autopilot platform, PX4 middleware, and is equipped with a Pixracer flight computer, supporting both flight control and ArduPilot’s SITL simulation.
Information

01.01.1970 (20650 days ago)
Recommend