Image
Description
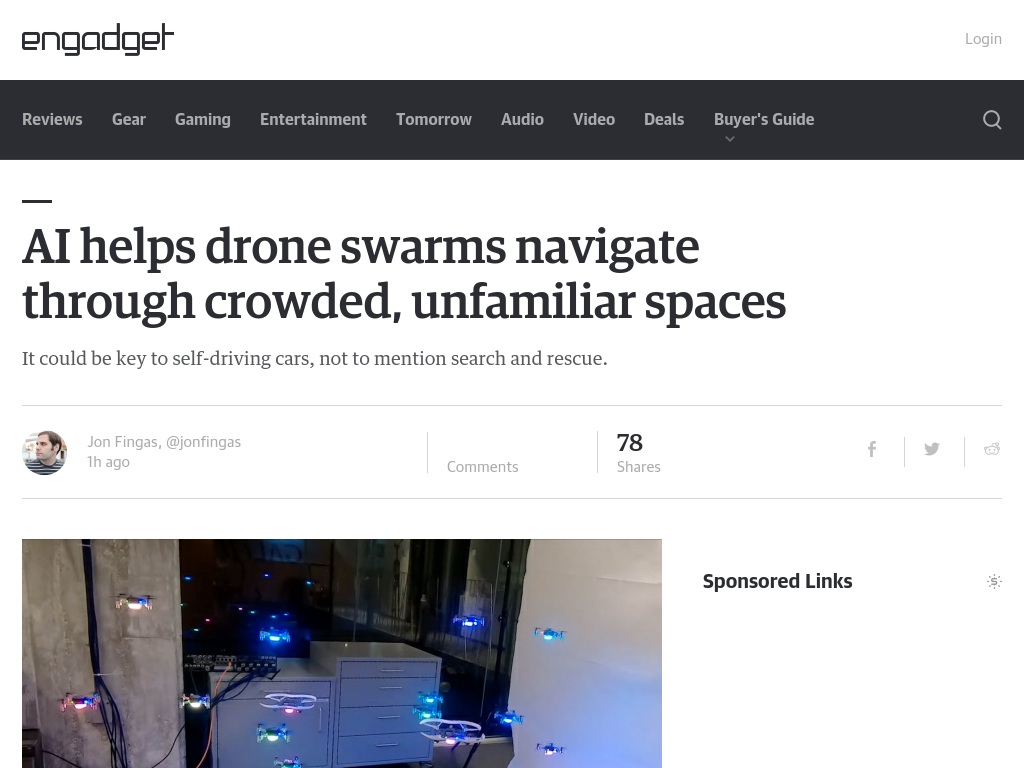
Drone swarms frequently fly outside for a reason: it’s difficult for the robotic fliers to navigate in tight spaces without hitting each other. Caltech researchers may have a way for those drones to fly indoors, however. They’ve developed a machine learning algorithm, Global-to-Local Safe Autonomy Synthesis (GLAS), that lets swarms navigate crowded, unmapped environments. The system works by giving each drone a degree of independence that lets it adapt to a changing environment. Instead of relying on existing maps or the routes of every other drone in the swarm, GLAS has each machine learning how to navigate a given space on its own even as it coordinates with others. This decentralized model both helps the drones improvise and makes scaling the swarm easier, as the computing is spread across many robots.
Information

Recommend